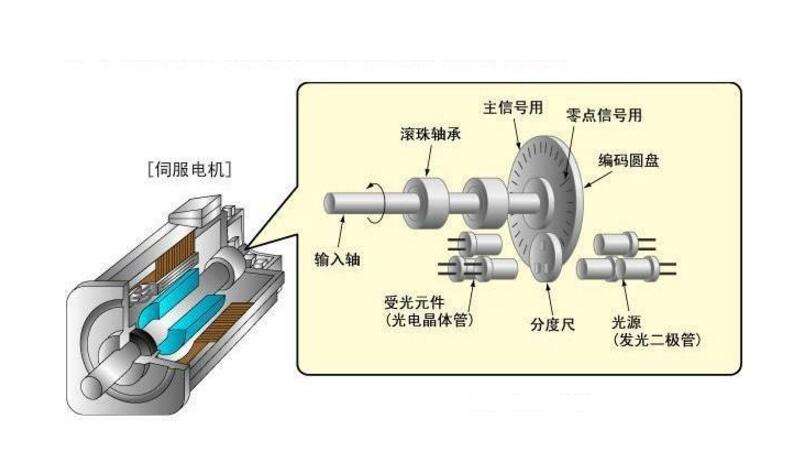
伺服电机究竟是怎样作业的?
什么是
伺服电机
伺服电机(servo motor )是指在伺服体系中操控机械元件作业的发动机,是一种补助马达直接变速设备。
伺服电机作业原理
伺服首要靠脉冲来定位,根本上能够这样理解,
伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,然后完成位移。
因为,
伺服电机自身具有宣布脉冲的功用,所以
伺服电机每旋转一个角度,都会宣布对应数量的脉冲,这样,和
伺服电机接受的脉冲构成了呼应,或许叫闭环,如此一来,体系就会知道发了多少脉冲给
伺服电机,一起又收了多少脉冲回来,这样,就能够很精确的操控电机的滚动,然后完成精确的定位,能够到达0.001mm。
一、沟通伺服电动机沟通伺服电动机定子的结构根本上与电容分相式单相异步电动机类似.其定子上装有两个方位互差90°的绕组,一个是励磁绕组Rf,它一向接在沟通电压Uf上;另一个是操控绕组L,联接操控信号电压Uc。所以沟通伺服电动机又称两个伺服电动机。 沟通伺服电动机的转子一般做成鼠笼式,但为了使伺服电动机具有较宽的调速规模、线性的机械特性,无“自转”现象和快速呼应的功用,它与一般电动机比较,应具有转子电阻大和滚动惯量小这两个特征。现在运用较多的转子结构有两种形式:一种是选用高电阻率的导电资料做成的高电阻率导条的鼠笼转子,为了减小转子的滚动惯量,转子做得细长;另一种是选用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的滚动惯量很小,反应敏捷,并且作业平稳,因而被广泛选用。 沟通伺服电动机在没有操控电压时,定子内只有励磁绕组发作的脉动磁场,转子静止不动。当有操控电压时,定子内便发作一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随操控电压的巨细而改变,当操控电压的相位相反时,伺服电动机将回转。 沟通伺服电动机的作业原理与分相式单相异步电动机尽管类似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机比较,有三个显著特征: 1、起动转矩大 因为转子电阻大,其转矩特性曲线如图3中曲线1所示,与一般异步电动机的转矩特性曲线2比较,有明显的差异。它可使临界转差率S0>1,这样不只使转矩特性(机械特性)更挨近于线性,并且具有较大的起动转矩。因而,当定子一有操控电压,转子当即滚动,即具有起动快、灵敏度高的特征。 2、作业规模较广 3、无自转现象 正常作业的伺服电动机,只要失掉操控电压,电机当即中止作业。当伺服电动机失掉操控电压后,它处于单相作业状态,因为转子电阻大,定子中两个相反方向旋转的旋转磁场与转子效果所发作的两个转矩特性(T1-S1、T2-S2曲线)以及组成转矩特性(T-S曲线) 沟通伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、26V、36V、115V等多种。 沟通伺服电动机作业平稳、噪音小。但操控特性对错线性,并且因为转子电阻大,损耗大,功率低,因而与同容量直流伺服电动机比较,体积大、分量重,所以只适用于0.5-100W的小功率操控体系。
二、直流
伺服电机
直流
伺服电机速度操控原理图
直流
伺服电机分为有刷和无刷电机。有刷电机本钱低,结构简略,发动转矩大,调速规模宽,操控简略,需求保护,但保护便利(换碳刷),发作电磁搅扰,对环境有要求。因而它能够用于对本钱敏感的一般工业和民用场合。 无刷电机体积小,分量轻,出力大,呼应快,速度高,惯量小,滚动滑润,力矩安稳。操控杂乱,简略完成智能化,其电子换相办法灵活,能够方波换相或正弦波换相。电机免保护,功率很高,作业温度低,电磁辐射很小,长寿命,可用于各种环境。 2.沟通
伺服电机也是无刷电机,分为同步和异步电机,现在运动操控中一般都用同步电机,它的功率规模大,能够做到很大的功率。大惯量,最高滚动速度低,且跟着功率增大而快速降低。因而适合做低速平稳作业的运用。 3.
伺服电机内部的转子是永磁铁,驱动器操控的U/V/W三相电构成电磁场,转子在此磁场的效果下滚动,一起电机自带的编码器反应信号给驱动器,驱动器根据反应值与目标值进行比较,调整转子滚动的角度。
伺服电机的精度决定于编码器的精度(线数)。
三、简略
伺服电机的作业原理
伺服电机作业原理_电路图
伺服电动机的作业原理及效果:
伺服电机的效果是驱动操控目标。被控目标的转距和转速受信号电压操控,信号电压的巨细和极性改动时,电机的滚动速度和方向也跟着改变。
伺服电动机分类:
沟通伺服电动机和直流伺服电动机。
沟通伺服电动机:
原理与两相沟通异步电机相同,定子上装有两个绕组—励磁绕组和操控绕组。
励磁绕组和操控绕组在空间相隔90°。
接线:
励磁绕组的接线 操控绕组的接线
励磁绕组中串联电容C的意图是为了发作两相旋转磁场。
恰当挑选电容的巨细,可使通入两个绕组的电流相位差挨近90°,因而便发作旋转磁场,在旋转磁场的效果下,转子便滚动起来。
例:挑选电容,可使沟通
伺服电机电路中的电压电流的相量关系如图所示。
1)U2= 0 时,转子中止。
这时,尽管U2 =0V,U1仍存在,似乎成单相作业状态,但和单相异步机不同。若单相电机发动作业后,呈现单相后仍转。
伺服电机不同,单相电压时设备不能转。
原因:沟通
伺服电机 R2规划得较大。所以在U2=0时,沟通
伺服电机的T=f(s)曲线如下页图:
沟通伺服电动机的T=f(s)曲线(U2=0时)
当U2=0V时,脉动磁场分成的正反向旋转磁场发作的转距T'、T" 的组成转矩T与单相异步机不同。组成转矩的方向与旋转方向相反,所以电机在U2=0V时,能当即中止,体现了操控信号的效果(有操控电压时滚动,无操控电压时不转),以免失控。
(2)沟通
伺服电机R2规划得较大,使Sm>1,Tst大,发动敏捷,安稳作业规模大。
(3)操控电压U2巨细改变时,转子转速相应改变,转速与电压U2成正比。U2的极性改动时,转子的转向改动。
沟通伺服电动机的机械特性曲线( U1=co
nst )
运用
沟通
伺服电机的输出功率一般为0.1-100W,电源频率分50Hz、400Hz等多种。它的运用很广泛,如用在自动操控、温度自动记录等体系中。
直流伺服电动机
结构:与直流电动机根本相同。为减小滚动惯量做得细长一些。
作业原理:与直流电动机相同。
供电办法:他励。励磁绕组和电枢由两个独立电源供电:
U1为励磁电压,U2为电枢电压。
由机械特性可知:
(1)U1(即磁通¢)不变时,必定的负载下,U2↑,n↑。
(2)U2=0时,电机当即停转。
回转:电枢电压的极性改动,电机回转。
运用:
直流
伺服电机的特性较沟通
伺服电机硬。经常用在功率稍大的体系中,它的输出功率一般为1-600W。它的用处很多,如随动体系中的方位操控等。
伺服电机在工业机器人中的运用
机器人工业的增加如火如荼,遍地开花,很多机床厂家、伺服厂家和其他有条件的企业都纷繁转向机器人市场。为何机床厂家和伺服厂家如此活跃转型研制机器人?工业机器人有4大组成部分,分别为本体,伺服,减速器和操控器。
步进电机用于驱动机器人的关节,要求是要有最大功率质量比和扭矩惯量比、高发动转矩、低惯量和较宽广且滑润的调速规模。
机器人工业强大,需求在伺服、集成操控等范畴相继取得突破才干成行。现在,我国在伺服等范畴依然处于待突破阶段,对本土机器人工业造成不利影响。
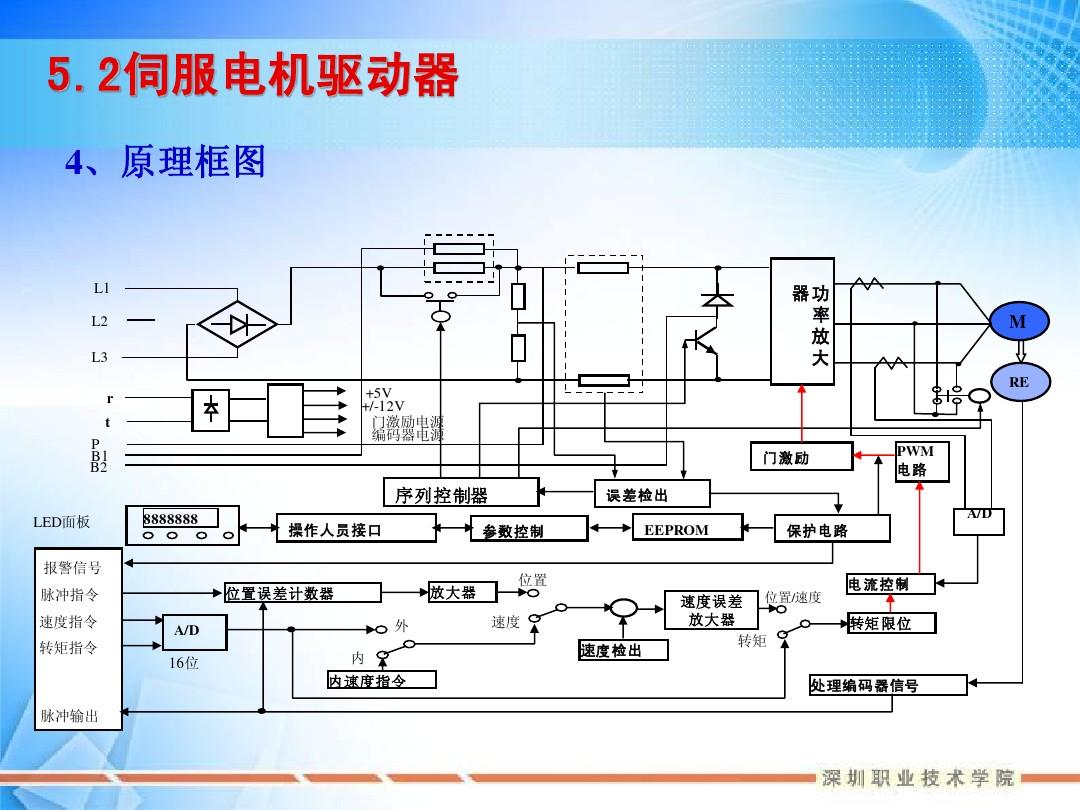
工业机器人电动伺服体系的一般结构为三个闭环操控,即电流环、速度环和方位环。一般情况下,关于沟通伺服驱动器,可经过对其内部功用参数进行人工设定而完成方位操控、速度操控、转矩操控等多种功用。
工业自动化进程的持续推动,关于自动化软件及硬件设备的需求都居高不下,其中国内工业机器人的市场一向稳步增加,估计在2015我国成为全球最大需求市场。
与此一起,直接带动伺服体系的市场需求。美莱克供应的鸣志步进
伺服电机体系在集成式电机中完美融入了伺服操控技能,具有精度高、安稳性好、速度快等特征。
现在,因为高发动转矩、大转矩、低惯量的交、直流
伺服电机在工业机器人中得到广泛的运用。其他电机,如沟通
伺服电机、步进电机根据不同的运用需求也会运用到工业机器人中。
特别是像机器人末端执行器(手爪)应选用体积、质量尽可能小的电机,尤其是要求快速呼应时,
伺服电机必须具有较高的可靠性,并且有较大的短时过载能力。具体运用要求:
快速性。
发动转矩惯量比大。
操控特性的接连性和直线性,跟着操控信号的改变,电机的转速能接连改变,有时还需转速与操控信号成正比或近似成正比。
调速规模宽。
体积小、质量小、轴向尺度短。
能经受得起严苛的作业条件,可进行十分频频的正反向和加减速作业,并能够在短时间内接受过载。
伺服电机职业未来趋势
现代沟通伺服体系,在阅历了从模仿到数字化的改变后,其内部数字操控环现已无处不在,比方换相、电流、速度和方位操控等;其完成首要经过新式功率半导体器材,像高功用DSP加FPGA、乃至伺服专用模块也家常便饭。且新的功率器材或模块每2~2.5年就会更新一次,新的软件算法也日新月异,世界厂商的伺服产品大约每5年亦会更新换代——总而言之,产品生命周期越来越短,改变越来越快。总结国内外伺服厂家的技能道路和产品道路,结合市场需求的改变,能够看到以下一些
伺服电机体系的最新展开趋势:
高功率化
尽管高效化一向都是伺服体系重要的展开课题,但是仍需求继续加强。首要包含电机自身的高功率:比方永磁资料功用的改进和更好的磁铁设备结构规划;也包含驱动体系的高功率化:包含逆变器驱动电路的优化,加减速运动的优化,再生制动和能量反应以及更好的冷却办法等。
直接驱动
直接驱动包含选用盘式电机的转台伺服驱动和选用直线电机的线性伺服驱动,因为消除了中心机械传动设备的(如齿轮箱)传递误差,然后完成了高速化和高定位精度。而直线电机简略改动形状的特征能够使选用线性直线机构的各种设备完成小型化和轻量化。
高速、高精、高功用化
选用更高精度的编码器,更高采样精度和数据位数、速度更快的DSP,无齿槽效应的高功用旋转电机、直线电机,以及运用自适应、人工智能等各种现代操控战略,不断将伺服体系的基础目标(操控速度、操控精度)进步。
一体化和集成化
电动机、反应、操控、驱动、通讯的纵向一体化成为当时小功率伺服体系的一个展开方向。有时我们称这种集成了驱动和通讯的电机叫智能化电机,有时我们把集成了运动操控和通讯的驱动器叫智能化伺服驱动器。电机、驱动和操控的集成使三者从规划、制作到作业、保护都更紧密地融为一体。但是这种办法面对更大的技能应战和工程师运用习惯的应战,因而很难成为干流,在整个伺服市场中是一个很小的有特征的部分。
通用化
通用型驱动器装备有很多的参数和丰厚的菜单功用,便于用户在不改动硬件装备的条件下,便利地设置成V/F操控、无速度传感器开环矢量操控、闭环磁通矢量操控、永磁无刷沟通伺服电动机操控及再生单元等五种作业办法,适用于各种场合,能够驱动不同类型的电机,比方异步电机、永磁同步电机、无刷直流电机、步进电机,也能够适应不同的传感器类型乃至无方位传感器。能够运用电机自身装备的反应构成半闭环操控体系,也能够经过接口与外部的方位或速度或力矩传感器构成高精度全闭环操控体系。
智能化
现代沟通伺服驱动器都具有参数记忆、毛病自确诊和剖析功用,绝大多数进口驱动器都具有负载惯量测定和自动增益调整功用,有的能够自动辨识电机的参数,自动测定编码器零位,有些则能自动进行振动抑止。将电子齿轮、电子凸轮、同步跟踪、插补运动等操控功用和驱动结合在一起,关于伺服用户来说,则供给了更好的体验。
网络化和模块化
将现场总线和工业以太网技能、乃至无线网络技能集成到伺服驱动器当中,现已成为欧洲和美国厂商的常用做法。现代工业局域网展开的重要方向和各种总线标准竞争的焦点就是怎么适应高功用运动操控对数据传输实时性、可靠性、同步性的要求。跟着国内对大规模分布式操控设备的需求上升,高级数控体系的开发成功,网络化数字伺服的开发现已成为燃眉之急。模块化不只指伺服驱动模块、电源模块、再生制动模块、通讯模块之间的组合办法,并且指伺服驱动器内部软件和硬件的模块化和可重用。
从毛病确诊到预测性保护
跟着机器安全标准的不断展开,传统的毛病确诊和保护技能现已掉队,最新的产品嵌入了预测性保护技能,使得人们能够经过Internet及时了解重要技能参数的动态趋势,并采取预防性措施。比方:关注电流的升高,负载改变时评估尖峰电流,外壳或铁芯温度升高时监视温度传感器,以及对电流波形发作的任何畸变保持警惕。
专用化和多样化
尽管市场上存在通用化的伺服产品系列,但是为某种特定运用场合专门规划制作的伺服体系举目皆是。利用磁性资料不同功用、不同形状、不同外表粘接结构和嵌入式永磁转子结构的电机呈现,分割式铁芯结构工艺在日本的运用使永磁无刷
伺服电机的生产完成了高功率、大批量和自动化,并引起国内厂家的研讨